DBDプラズマアクチュエータを用いたフィードバック流れ制御技術に関する研究
JAXAスーパーコンピュータシステム利用成果報告(2022年2月~2023年1月)
報告書番号: R22JACA26
利用分野: JSS大学共同利用
- 責任者: 浅田健吾, 東京理科大学
- 問い合せ先: 浅田 健吾(asada@rs.tus.ac.jp)
- メンバ: 浅田 健吾, 小川 拓人
事業概要
ロケットや航空機, 自動車といった様々な輸送機周りの流れを, プラズマ放電を利用したDBDプラズマアクチュエータと呼ばれるデバイスを用いることで制御し, 高効率で堅牢な輸送機システム開発を実現する. 時々刻々と変化する流れに対応するため, 本事業では3次元非定常流れのシミュレーションを行い, フィードバック制御手法の開発・実証を行う.
参照URL
なし
JAXAスーパーコンピュータを使用する理由と利点
大規模な3次元非定常流れシミュレーションをJAXAスーパーコンピュータで計算実績が豊富な圧縮性流体解析ソルバLANS3Dを用いて実施可能なため.
今年度の成果
本事業では, DBDプラズマアクチュエータ(以下PA)を用いたNACA0015翼周り流れ(レイノルズ数:63,000)の剥離制御において, 迎角に応じてPAの駆動方法を変化させるフィードバック制御モデル(図1)の提案と性能検証を行ってきた. 検討する制御モデルは翼面上に配置した圧力センサーで計測した圧力値の低下を渦の通過と仮定し, 渦の通過に応じて翼前縁付近に配置されたアクチュエータのON/OFFを切り替えるものである.
令和4年度は昨年度に引き続き低迎角における制御能力を向上させるために, 標準的なバースト駆動の駆動周波数に対してパラメトリックスタディを実施した. バースト駆動はフィードバック制御とは異なり, 予め決められた無次元バースト周波数F+に従ってPAのON/OFFを切り替える駆動方法である. PAは翼前縁から コード長の5%位置に設置し, 迎角は2度とした. 令和4年度は失速以降の迎角で効果的であるとされてきた無次元周波数1や6に加えて, より高い周波数である12と30を検討した.
図2に各バースト周波数における揚抗比と空力係数を示す. BRはバースト比で, PAのONとOFFの時間比率を表している. 投入エネルギーが各周波数でなるべく同じになるようにBRを調整している. Continuousは連続駆動である. 揚抗比はF+=12が最も高く, 揚力はF+=30が最も高い. 抗力はF+=6が最も小さい.
図3に圧力係数(Cp)と表面摩擦係数(Cf)分布の比較を示す. PAを使用しないケース(PA-OFF)では, コード長の60%から80%の区間で平らなCp分布が見られ, Cfはこの区間で負になっていることから剥離していることがわかる. F+=30やContinuousではCpが平らな領域が後縁側にずれ, F+=1, 6のケースではCpが平らな領域は無く, 剥離は生じていない. F+=12のケースはPA-OFFと近いCp分布であるが, コード長の70%から80%の区間での圧力がやや高い. そのため抗力がPA-OFFより低くなり, 結果としてL/Dが最も高くなっている.
図4に各ケースの瞬間場を示す. PA-OFFのケースでは翼中央付近から流れが層流で剥離し, 乱流遷移後に再付着している. 一方PA-OFFケースとCp分布の似ていたF+=12のケースの遷移再付着位置はPA-OFFのケースとほぼ同じであるが, PAが誘起したスパン方向に軸をもつ2次元的な渦が翼面上に並んでいる. この渦の移流によって時間平均した際の剥離領域の圧力がPA-OFFよりも高くなると考えられる. また, F+=6のケースでは, 2次元的な渦が崩壊することなく翼後縁まで維持されているのに対して高周波数のF+=30やContinuousケースでは乱流遷移と再付着の位置がPA-OFFに比べて下流になっている.
以上のように用いるバースト周波数によって剥離領域の流れが変化し, 空力係数も大きく変化する. 揚抗比という観点ではF+=12が良いが, 揚力という観点ではF+=30が適切である. これらの知見を反映し, 自動的に駆動周波数を切り替えられるような制御機構をフィードバック制御手法に組み込めればよりロバストな制御になることが期待できる.
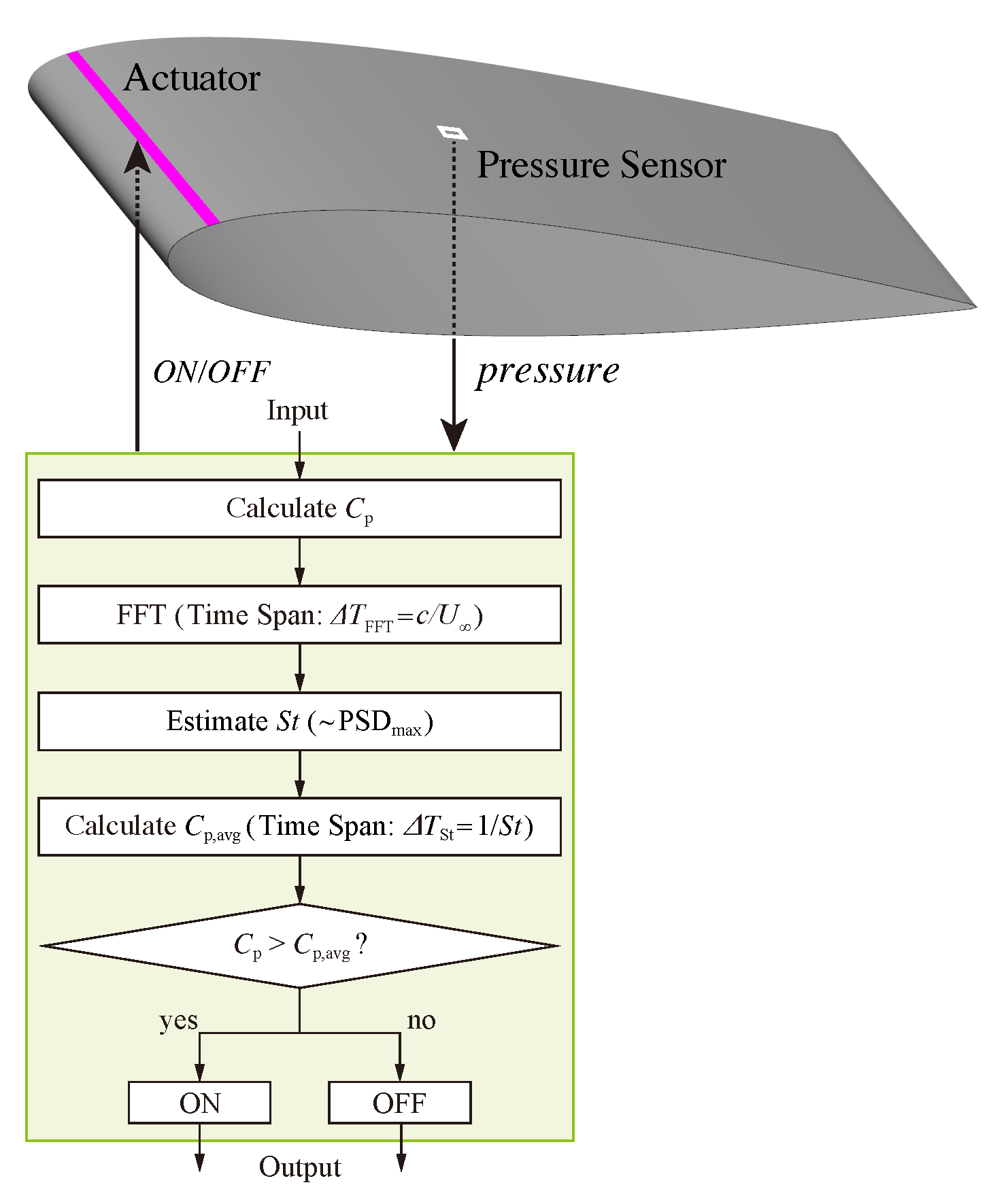
図1: 提案する翼流れフィードバック剥離制御モデル
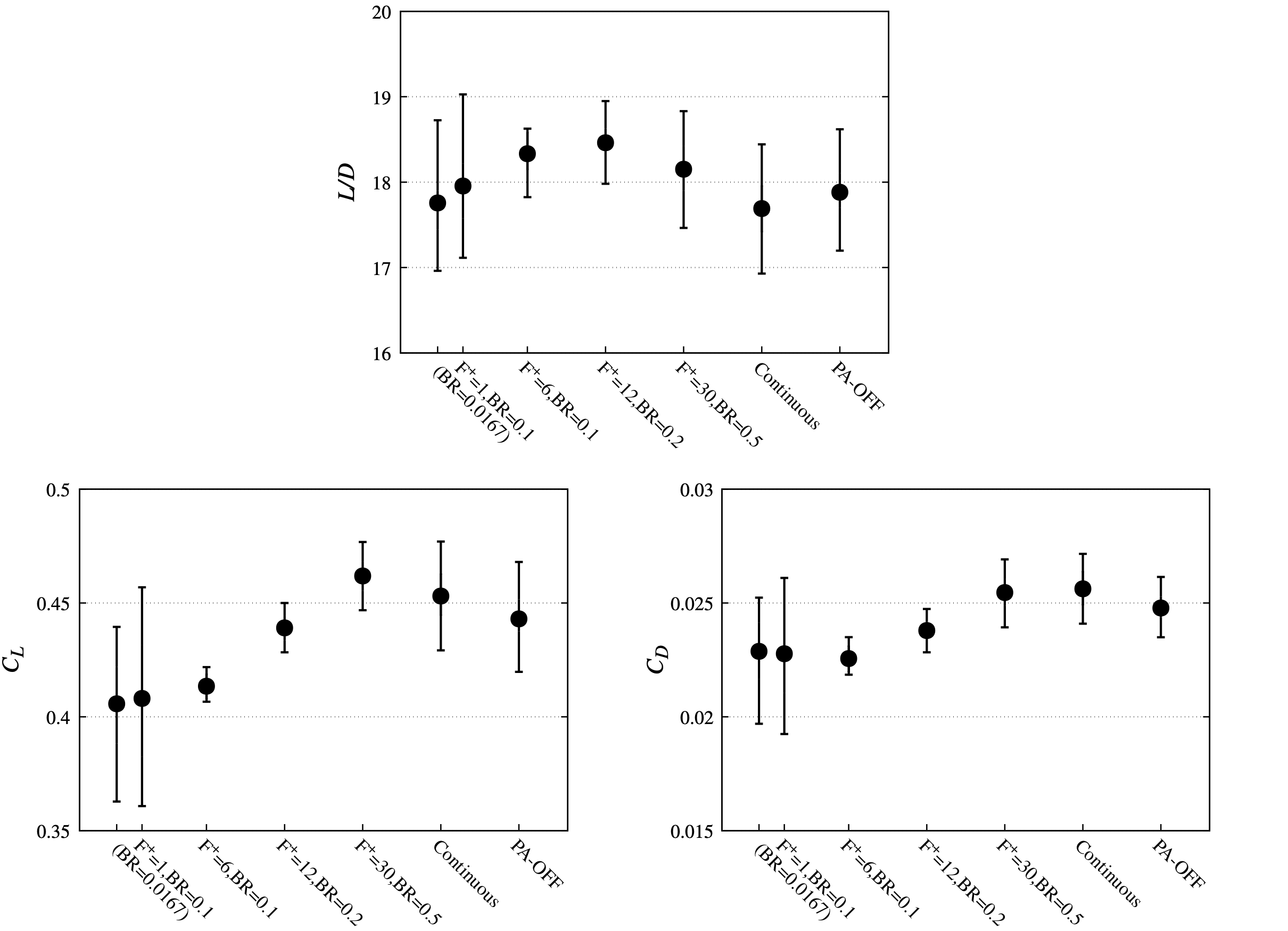
図2: 揚抗比と空力係数
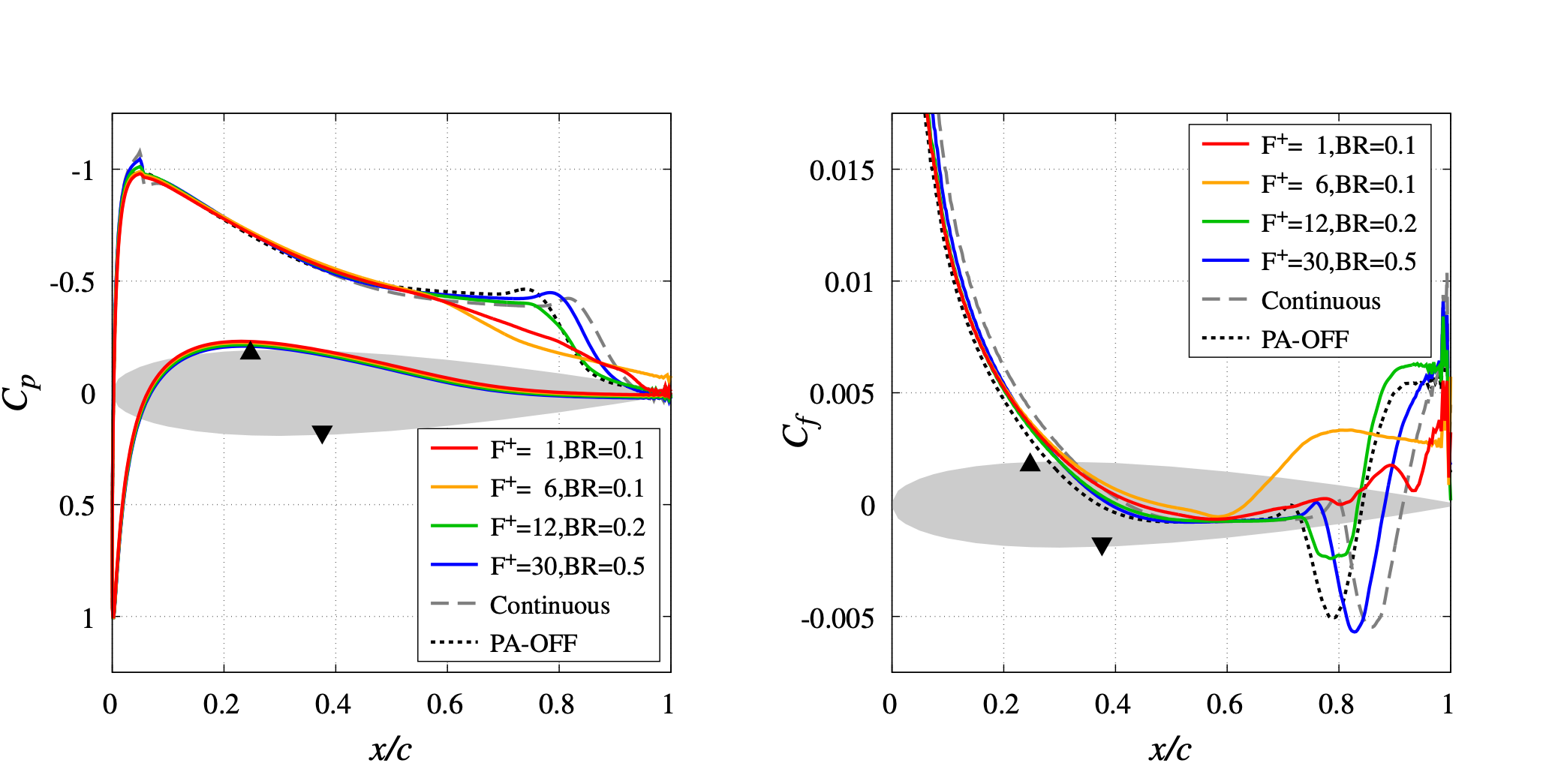
図3: 圧力係数と表面摩擦係数分布
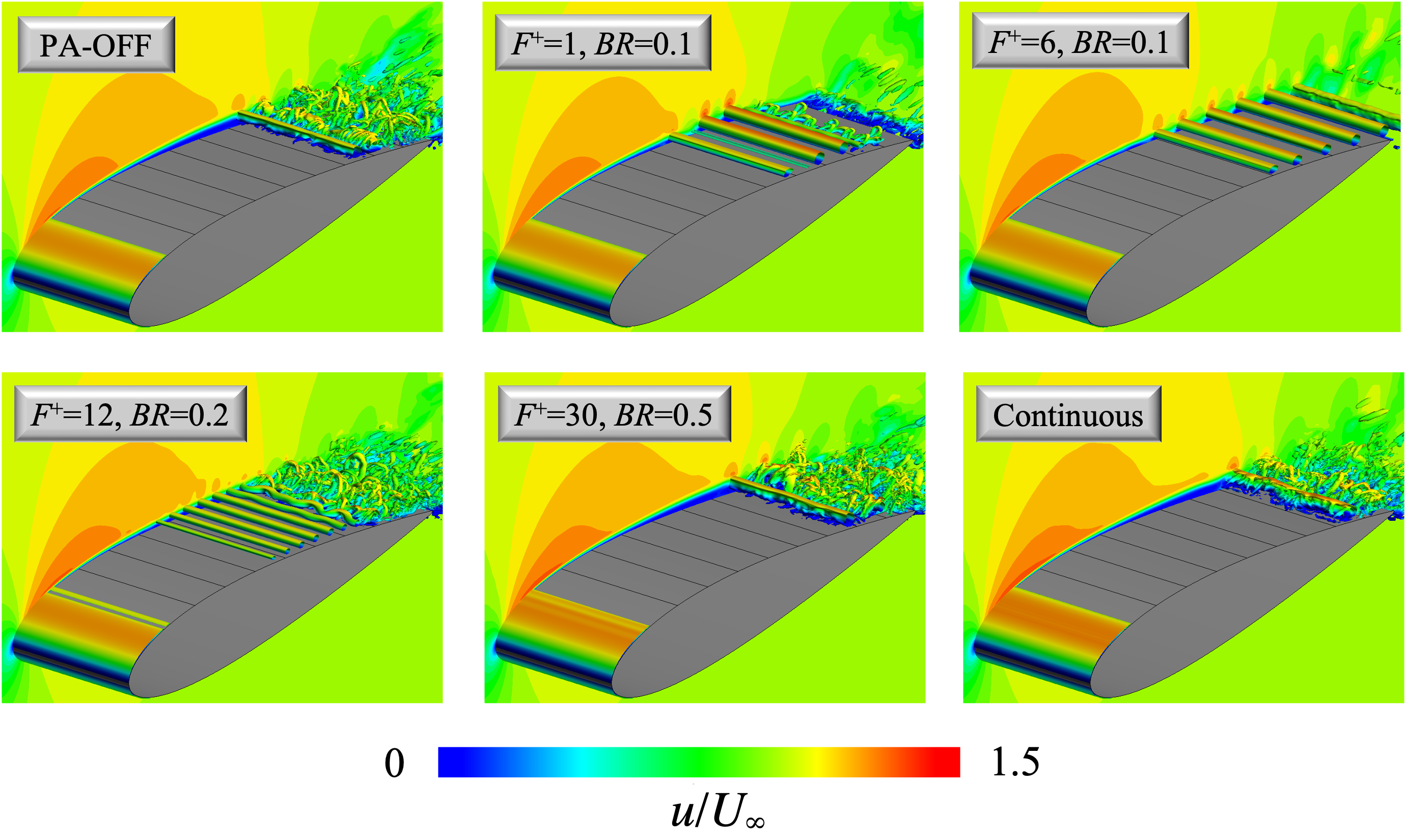
図4: 瞬間流れ場
成果の公表
-査読付き論文
Takuto Ogawa, Kengo Asada, Makoto Sato, Tomoaki Tatsukawa, Kozo Fujii, "Computational Study of the Plasma Actuator Flow Control for an Airfoil at Pre-Stall Angles of Attack," Applied Sciences MDPI, Vol. 12, No. 18, Sept. 2022.
JSS利用状況
計算情報
- プロセス並列手法: MPI
- スレッド並列手法: 自動並列
- プロセス並列数: 79
- 1ケースあたりの経過時間: 40 時間
JSS3利用量
総資源に占める利用割合※1(%): 0.30
内訳
JSS3のシステム構成や主要な仕様は、JSS3のシステム構成をご覧下さい。
| 計算システム名 | CPU利用量(コア・時) | 資源の利用割合※2(%) |
|---|---|---|
| TOKI-SORA | 8075364.21 | 0.35 |
| TOKI-ST | 0.00 | 0.00 |
| TOKI-GP | 0.00 | 0.00 |
| TOKI-XM | 0.00 | 0.00 |
| TOKI-LM | 0.00 | 0.00 |
| TOKI-TST | 0.00 | 0.00 |
| TOKI-TGP | 0.00 | 0.00 |
| TOKI-TLM | 0.00 | 0.00 |
| ファイルシステム名 | ストレージ割当量(GiB) | 資源の利用割合※2(%) |
|---|---|---|
| /home | 60.00 | 0.05 |
| /data及び/data2 | 16758.09 | 0.13 |
| /ssd | 200.00 | 0.03 |
| アーカイバシステム名 | 利用量(TiB) | 資源の利用割合※2(%) | J-SPACE | 11.12 | 0.05 |
|---|
※1 総資源に占める利用割合:3つの資源(計算, ファイルシステム, アーカイバ)の利用割合の加重平均.
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
ISV利用量
| 利用量(時) | 資源の利用割合※2(%) | |
|---|---|---|
| ISVソフトウェア(合計) | 0.00 | 0.00 |
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
JAXAスーパーコンピュータシステム利用成果報告(2022年2月~2023年1月)