回転翼機の空力解析
マルチロータの空力性能および空力騒音解析
ドローンや電動垂直離着陸機(Electric Vertical Take-Off and Landing aircraft、 eVTOL aircraft)のようなマルチロータ機のロータブレード設計に着目し、 空力性能と空力騒音を両立するブレード設計について研究開発を進めています。 本事業ではeVTOL機として、 マルチコプタ型とリフトアンドクルーズ型機を想定し、 ブレード設計パラメータが空力性能と空力騒音に与える影響を調査しています。
回転翼CFDツールrFlow3Dと回転翼機騒音解析ツールrNoiseを用いて、 マルチコプタ型の機体を想定し、空力性能と空力騒音を評価しました。マルチコプタのロータは4ロータとし、 各ロータシステムは二重反転ロータとしています。 ホバリング条件と前進飛行条件で数値解析を実施しました。 数値解析結果より、 二重反転ロータ特有の上下ロータの交差時に発生する急激な圧力変動によって、 シングルロータシステムよりも騒音が大きくなることがわかりました。さらに、 前方ロータの翼端渦流れが後方ロータに対して複雑に干渉し、 空力性能と空力騒音に影響を与えていることが明らかになりました。
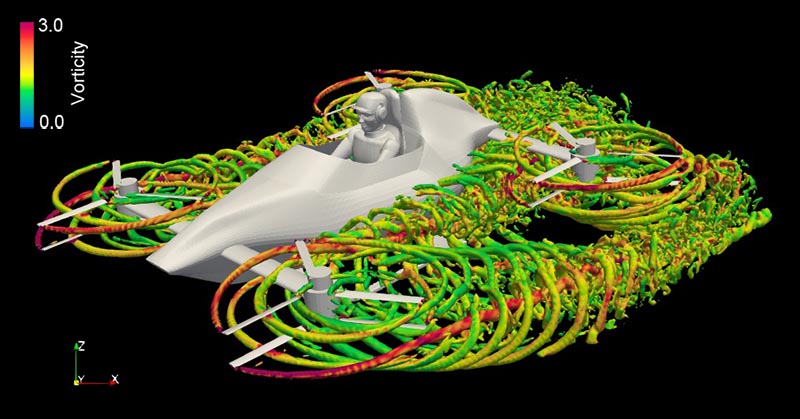
マルチコプター周りの渦度の等値面表示(色は渦度)
*機体形状は計算に含まれていません。単座の有人機を想定しています。
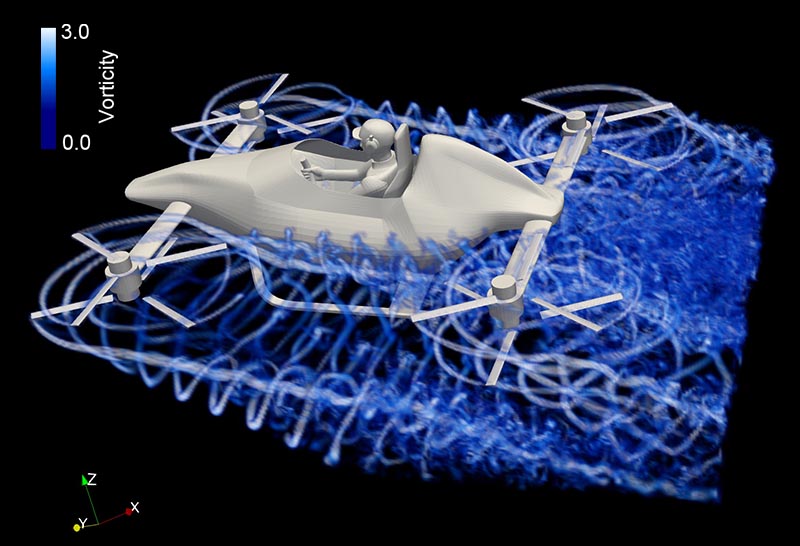
マルチコプター周りの渦度のボリュームレンダリング表示
*機体形状は計算に含まれていません。単座の有人機を想定しています。
地面付近での4ロータードローン周りの空力解析
最近はドローンの大型化が進んでおり、さらに複数名搭載のマルチコプタの開発も進んでいます。 しかしながら、 互いに回転方向が異なる隣接する複数ロータが誘起する流れ場複雑であり、 特に地面近くで飛行する際は地面効果もこれまでのシングルロータのものと異なるものと考えられます。
可変ピッチ制御のクワッドロータのドローンをベースに計算モデルを作成しました。 地面からの距離が変化するに従い、ドローンの性能変化と共に、ドローン周りの流れ場と地面に沿う流れ場の様子を解析しました。 マルチコプタの地面効果はシングルロータと比べて, 複雑な変化をすることが分わかりました。
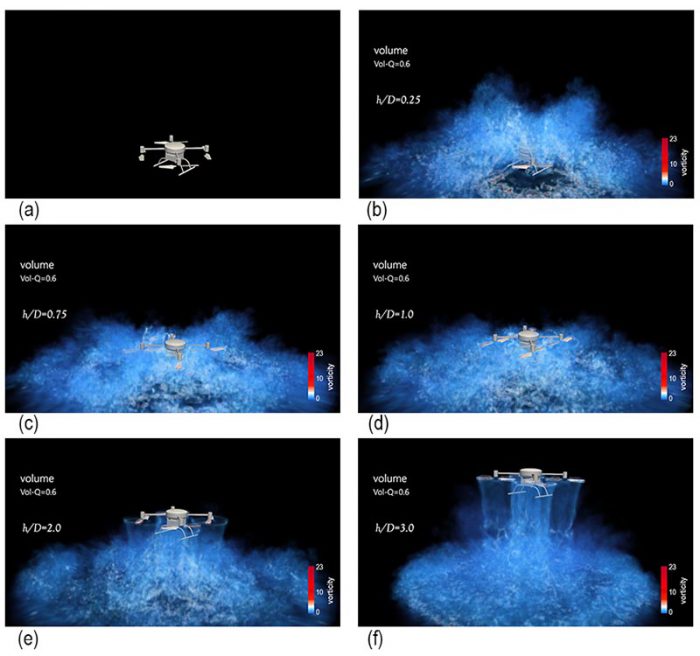
4ロータードローン周りの渦の分布(ボリュームレンダリング表示)
4ロータードローン周りの渦の空力解析
未来のヘリコプタ、コンパウンド・ヘリコプタの空力解析
コンパウンド・ヘリコプタは未来のロータークラフトとして期待されているヘリコプタの一種です。日本ではその特性を生かした、災害救助、山岳での救難、離島からの緊急搬送のニーズが考えられ、それらに適した概念設計案の提示を目標に先導的な技術開発を行うことを目指しています。
この機体は通常のヘリコプタのような優れたホバリング性能を維持しつつ、最大飛行速度の大幅な向上(約1.8倍)が期待できます。

飛行可能なコンパウンド・ヘリコプタのラジコンモデル
コンパウンド・ヘリコプタのような複数の回転翼周りの非定常な流れ場を解析するために、JAXAでrFlow3Dという流 体・構造連成の解析コードを開発しました。移動重合格子法を採用し、ブレードの弾性変形も同時に解析する能力を有しています。複雑な形状の胴体周りの解析 は非構造格子を埋め込み、FaSTARやTASコードのルーチンを利用しています。ヘリコプタのロータブレード以外に、プロペラやマルチロータ型ドロー ン、風車などの解析にも利用されています。
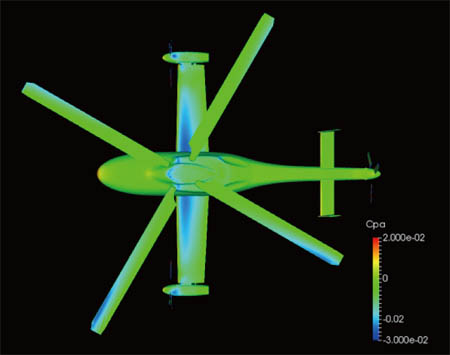
コンパウンド・ヘリコプタ表面Cpa分布の表示
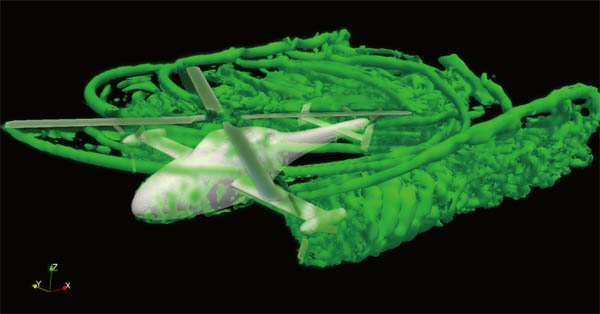
コンパウンド・ヘリコプタ機体周りのCpa等値面表示
コンパウンド・ヘリコプタの空力解析
ヘリコプタ関連解析の紹介サイト