JSS3におけるMADOCAを用いた高精度軌道決定
JAXAスーパーコンピュータシステム利用成果報告(2024年2月~2025年1月)
報告書番号: R24JR0800
利用分野: 宇宙技術
- 責任者: 小暮聡, 第一宇宙技術部門衛星測位技術統括
- 問い合せ先: 瀧口 博士(takiguchi.hiroshi@jaxa.jp)
- メンバ: 三好 翔, 永野 達也, 成田 秀樹, 桶谷 正人, 鶴田 尚史, 瀧口 博士, 渡邉 誠
事業概要
衛星測位システム技術ユニットでは, 複数GNSS対応高精度軌道時刻推定ツール(MADOCA)を用いて, 高精度測位に必要不可欠な衛星の軌道・時刻情報を定常的に生成し, ネットワーク経由でユーザーに提供している. JSS3では, MADOCAの更なる高精度化を目的とした, 長期間のデータ解析, シミュレーションを高速に行う.
参照URL
「MADOCA Products」参照.
JAXAスーパーコンピュータを使用する理由と利点
MADOCAの高精度化に必要な太陽輻射圧などの擾乱源のモデル化や各種パラメータの最適化には長期間のデータ解析が必要である. JSS3を利用する事で, 計算時間を短縮する.
今年度の成果
今年度JSS3を用いて実施した研究開発業務は以下の通り.
1)MADOCA定常解析のバックアップ解析
2)MADOCAに新規観測量を用いた模擬解析機能の実装
2-1)擬似観測データ生成
2-2)擬似観測データを用いた軌道時刻推定シミュレーション
3)MADOCAプロダクトを用いた測位解析
3-1)Precise Point Positioning(PPP)精度評価
3-2)PPP定常解析結果の再解析
3-3) 基準座標系の変更等による局の選定(図1,2)
4) MADOCA予測暦のLegacy Navigation(LNAV)及びCivil Navigation(CNAV)形式へのフィッティング
5)アンサンブルクロックソフトウェア(CHRONOS)を用いたシミュレーション及びその評価(図3,4)
衛星測位システム技術ユニットでは, International GNSS Service (IGS)のMulti-GNSS Pilot Projectに参画しており, MADOCAによる軌道時刻推定結果を提供している. 今年度, IGSにおいて, 2025/02/02暦から基準座標系のIGS20からIGb20への変更および衛星軌道時刻推定に使用するQZSSの測位信号のL1C/A-L2CからL1C-L5への変更が要請され, JSS3を用いて当変更に適切な局の選定を行った.
各種原振のシミュレーションデータを使用してアンサンブルクロックを生成するソフトウェアCHRONOSにおいて, 原振にジャンプ等が発生し異常が起きた際に, 即座に異常原振の重みを0にして, アンサンブルクロックデータにジャンプが発生しないアルゴリズムを実装した. その改修前後の評価にJSS3を使用した.
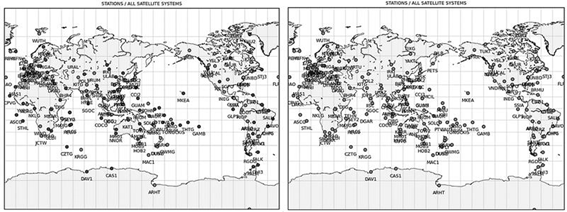
図1: MADOCAが使用する世界各地の観測局の大規模変更を実施した前後における局位置の変化(左図→右図):本対応にあたり, MADOCAで使用する測位信号の見直しのため, JSS3を用いて1週間分の局の位置推定および測位衛星の軌道時刻推定を複数パターン実行した. JSS3の活用により, 短時間に多数のパターンの計算を行うことができた.
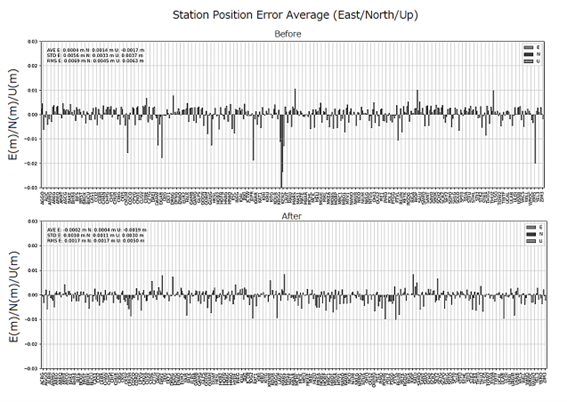
図2: MADOCAが使用する世界各地の観測局の大規模変更を実施した前後における局位置推定誤差の変化(上図→下図):局選定評価で使用した2025/01/01~2025/01/07の使用局変更前後の局位置についてJSS3を用いたMADOCAによる推定結果とIGSの推定結果の差分(East/North/Up)のグラフである. JSS3を用いて適切な局選定を行ったことにより, 局位置推定の結果をIGSの推定結果に近づけることができ, 2025/02/02の変更以降も同程度の推定結果が得られている.
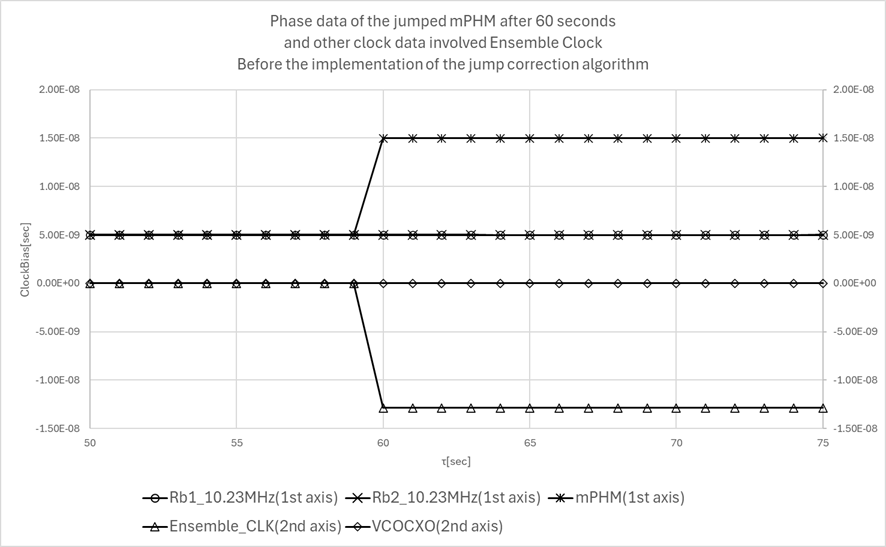
図3: アルゴリズム実装前のCHRONOSによる各原振とアンサンブルクロック及びVCOCXOの位相データプロット図. 経過時間60秒において, mPHMに1E-08[sec]のジャンプを発生させている. 実装前のデータは異常原振の重みをそのまま使用しているため, アンサンブルクロックにおいてもジャンプが発生している.
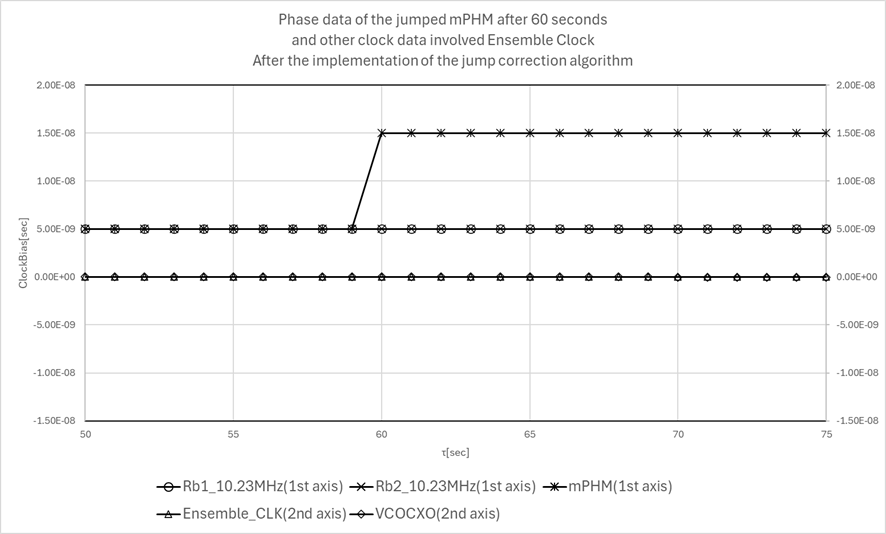
図4: アルゴリズム実装後のCHRONOSによる各原振とアンサンブルクロック及びVCOCXOの位相データプロット図. 経過時間60秒において, mPHMに1E-08[sec]のジャンプを発生させているが, 異常原振の重みを即座に0にするアルゴリズムにより, アンサンブルクロックにおいて位相データにジャンプは認められない.
成果の公表
なし
JSS利用状況
計算情報
- プロセス並列手法: 非該当
- スレッド並列手法: OpenMP
- プロセス並列数: 1
- 1ケースあたりの経過時間: 30 分
JSS3利用量
総資源に占める利用割合※1(%): 0.03
内訳
JSS3のシステム構成や主要な仕様は、JSS3のシステム構成をご覧下さい。
| 計算システム名 | CPU利用量(コア・時) | 資源の利用割合※2(%) |
|---|---|---|
| TOKI-SORA | 0.00 | 0.00 |
| TOKI-ST | 1371.17 | 0.00 |
| TOKI-GP | 0.00 | 0.00 |
| TOKI-XM | 0.00 | 0.00 |
| TOKI-LM | 1472.35 | 0.11 |
| TOKI-TST | 198691.14 | 3.57 |
| TOKI-TGP | 0.00 | 0.00 |
| TOKI-TLM | 554.94 | 1.47 |
| ファイルシステム名 | ストレージ割当量(GiB) | 資源の利用割合※2(%) |
|---|---|---|
| /home | 1119.00 | 0.75 |
| /data及び/data2 | 28110.00 | 0.13 |
| /ssd | 0.00 | 0.00 |
| アーカイバシステム名 | 利用量(TiB) | 資源の利用割合※2(%) | J-SPACE | 0.00 | 0.00 |
|---|
※1 総資源に占める利用割合:3つの資源(計算, ファイルシステム, アーカイバ)の利用割合の加重平均.
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
ISV利用量
| 利用量(時) | 資源の利用割合※2(%) | |
|---|---|---|
| ISVソフトウェア(合計) | 0.00 | 0.00 |
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
JAXAスーパーコンピュータシステム利用成果報告(2024年2月~2025年1月)