画像認識を用いたロケット打ち上げ時のパッドクリアランス計測
JAXAスーパーコンピュータシステム利用成果報告(2022年2月~2023年1月)
報告書番号: R22JEK20201
利用分野: 宇宙技術
- 責任者: 砂坂義則, 宇宙輸送技術部門鹿児島宇宙センター射場技術開発ユニット
- 問い合せ先: 宇宙輸送技術部門 鹿児島宇宙センター 射場技術開発ユニット 坂野友香理(sakano.yukari@jaxa.jp)
- メンバ: 坂野 友香理
事業概要
ロケットのリフトオフ直後の機体挙動は, 機体・設備間のクリアランス余裕確保, 接触や損傷の回避, 音響, 測位衛星の捕捉状況に関わる重要事項である. しかし, 実際の打上げにおいては, 事前の設計評価及び測位衛星や機体搭載センサ等を用いた間接的な評価しかできないのが現状であり, 評価精度には改善の余地がある. これに対し, 外部から機体位置・速度・姿勢を独立して精密に測定できるシステムを構築することでより直接的な評価を正確に行うことができれば, ロケット/発射台のクリアランス設計や打上げ運用を改善することができる. 上記システム構築の第一歩として, パッドクリアランスを射点近傍画像を通じて計測することを目的とし, 本事業を実施した.
参照URL
なし
JAXAスーパーコンピュータを使用する理由と利点
射点近傍の画像からパッドクリアランスを計測するには, ①ロケットの検出, ②ロケットの3次元位置関係の取得, という2つ計算を行う必要がある. このうち, ①ロケットの検出を行うため, 深層学習を用いた画像認識モデルを採用しており, このモデルの学習を行う上でJAXAスーパーコンピューターを利用した. この利点として, GPUを用いて大規模な画像処理演算を高速に行うことができ, パッドクリアランス計測を効率的に行うことが出来る点が挙げられる.
今年度の成果
JAXAスーパーコンピュータを用いて構築した画像認識モデルに対し, 射点近傍で取得した打上げ時のロケット画像を代入することで, 予定通りロケットの位置検出を実施できた. この様子を, 図1へ示す. また, この検出を異なる2つの角度から実施し, データを重ね合わせて評価を行った結果, 検証用に取得した高度(図2), 本事業の目的であるパッドクリアランス(図3)について定量計測を行い, 妥当な値を得ることができた. 一方, 低高度・高高度での検出精度やカメラの振動, 学習データの不足等, 実用に向けた課題を識別することができたため, 今年度の活動の振り返りをもとに今後高精度化を目指す.
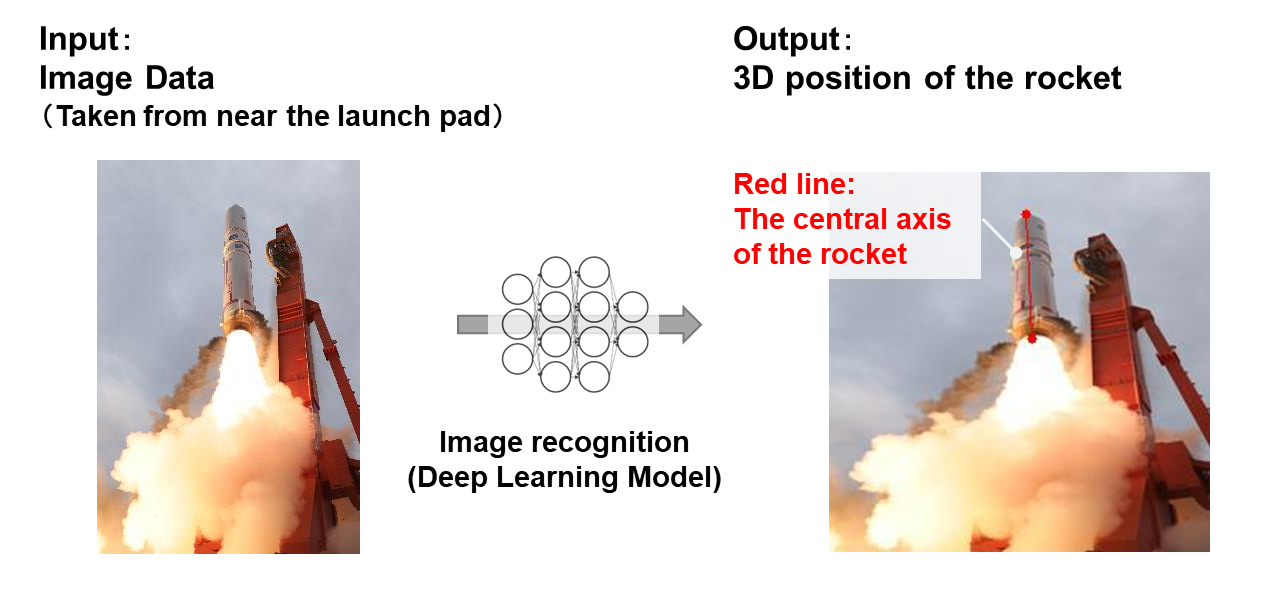
図1: ロケットの位置を検出するプロセス
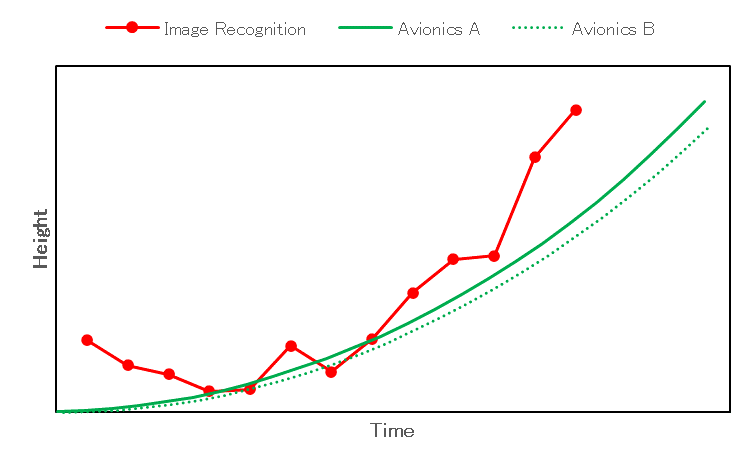
図2: 画像解析手法をロケット高度を用いて検証した結果(既存手法と高度の計測結果を比較)
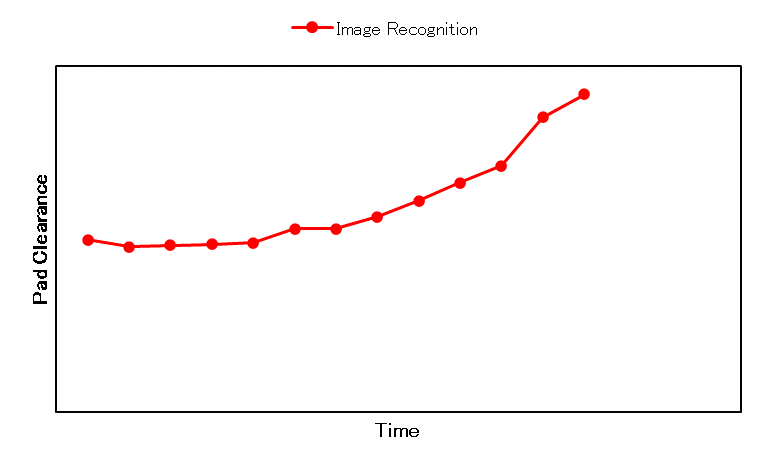
図3: パッドクリアランスの計測結果
成果の公表
なし
JSS利用状況
計算情報
- プロセス並列手法: 非該当
- スレッド並列手法: 非該当
- プロセス並列数: 1
- 1ケースあたりの経過時間: 2 時間
JSS3利用量
総資源に占める利用割合※1(%): 0.00
内訳
JSS3のシステム構成や主要な仕様は、JSS3のシステム構成をご覧下さい。
| 計算システム名 | CPU利用量(コア・時) | 資源の利用割合※2(%) |
|---|---|---|
| TOKI-SORA | 0.00 | 0.00 |
| TOKI-ST | 285.67 | 0.00 |
| TOKI-GP | 8.52 | 0.00 |
| TOKI-XM | 0.00 | 0.00 |
| TOKI-LM | 0.00 | 0.00 |
| TOKI-TST | 0.00 | 0.00 |
| TOKI-TGP | 0.00 | 0.00 |
| TOKI-TLM | 0.00 | 0.00 |
| ファイルシステム名 | ストレージ割当量(GiB) | 資源の利用割合※2(%) |
|---|---|---|
| /home | 2.50 | 0.00 |
| /data及び/data2 | 1625.00 | 0.01 |
| /ssd | 25.00 | 0.00 |
| アーカイバシステム名 | 利用量(TiB) | 資源の利用割合※2(%) | J-SPACE | 0.00 | 0.00 |
|---|
※1 総資源に占める利用割合:3つの資源(計算, ファイルシステム, アーカイバ)の利用割合の加重平均.
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
ISV利用量
| 利用量(時) | 資源の利用割合※2(%) | |
|---|---|---|
| ISVソフトウェア(合計) | 0.00 | 0.00 |
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
JAXAスーパーコンピュータシステム利用成果報告(2022年2月~2023年1月)