ImPACTドローン受託研究
JAXAスーパーコンピュータシステム利用成果報告(2017年4月~2018年3月)
報告書番号: R17JCMP17
利用分野: 競争的資金
- 責任者: 牧野好和 航空技術部門次世代航空イノベーションハブ
- 問い合せ先: 田辺安忠 tanabe.yasutada@jaxa.jp
- メンバ: 田辺安忠, 菅原瑛明
事業概要
マルチロータ型無人機を代表として,飛行ロボットは災害現場でも利用され始めている.しかしながら,現場で広く実用されるためには,耐風性や飛行制御の頑強性のさらなる向上が求められている.特に施設の点検などに利用される場合,壁付近での飛行も要求される.壁によって流れ場が大きく変わるため,オープンスペースでの飛行と大きく異なっている.また,壁と機体との位置関係によって飛行特性が変化するため,壁と機体の位置関係が機体の飛行特性に与える影響を明らかにし飛行制御方法に取り込むことは,飛行安全性の向上に有効である.
本研究はImPACT研究のタフロボティクスチャレンジの一環として実施されており,これまでに上壁(天井)がある場合と側壁の近くでの複数ロータに働く空力の変化を調べてきた.さらにトンネルを想定した閉鎖空間内でのマルチロータ機の飛行についても数値シミュレーションを進めている.
参照URL
「革新的研究開発推進プログラム ImPACT: 研究開発プログラム: 田所 諭PM」参照.
JSS2利用の理由
JAXAが開発した回転翼航空機向けのCFD解析コードrFlow3Dを利用しており,多数のロータの回転を忠実に模擬しているため,飛行条件ごとの各ケースは多くの計算時間と計算資源を要する.複数ケースを同時に高性能で処理できるJSS2の利用が本研究を受託する前提である.
今年度の成果
上に壁(天井)がある場合と側壁がある場合について,ホバリング中の6ロータのドローンが近づいた時の空気力とロータ性能の変化をCFD解析によって明らかにした.壁からロータ直径の1.5倍以内に近づくとロータの空力性能が顕著に変化した.また,狭いトンネル内において飛行するドローンの性能変化についても調べた.
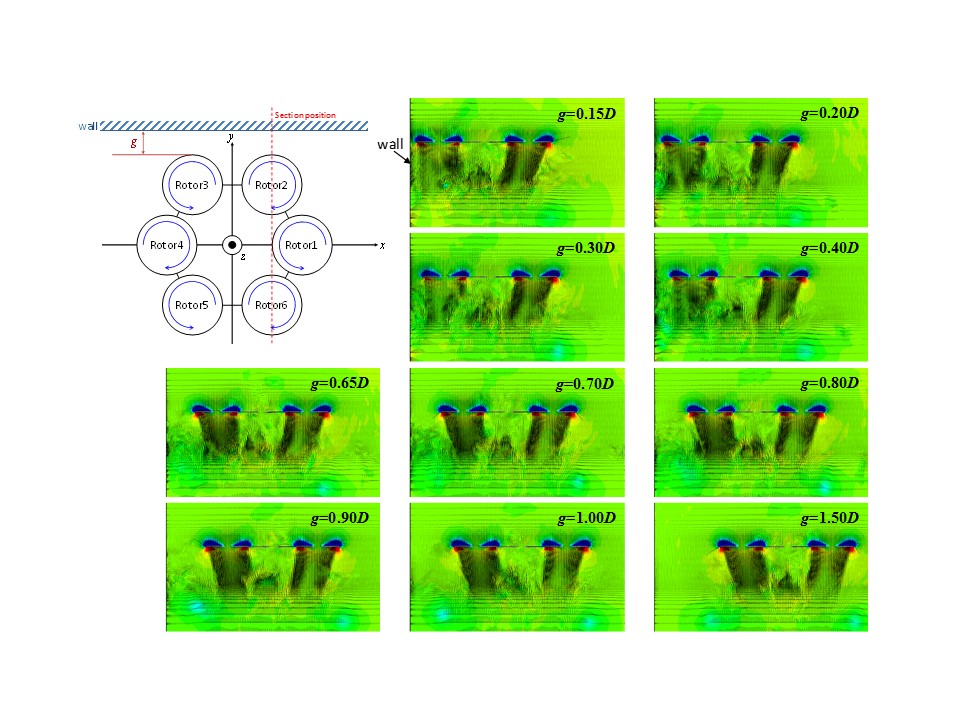
図1: 側壁からの距離による6ロータ・ドローンの流れ場の変化
成果の公表
■ 査読なし論文
1) 梅崎修一, 砂田茂, 田辺安忠, 米澤宏一, 得竹浩, "マルチロータ機のホバリング性能に対する翼型特性影響", 日本航空宇宙学会第48期年会講演会, 2017年4月13日~14日,東京大学山上会館.
2) 田中陸久,田辺安忠,砂田茂,米澤宏一,得竹浩, "ロータ間の空力干渉における位相角差の影響について",第48期年会講演会,2017年4月13〜14日,東京大学山上会館.
3) 菅原瑛明,田辺安忠, "ダクテッド・ロータ解析に向けた回転翼用CFDツールの開発",第49回流体力学講演会/第35回航空宇宙数値シミュレーション技術シンポジウム,2017年6月28日~30日,東京.
4) 米澤宏一,吉田直生, 松本紘典, 杉山和靖,田辺安忠,得竹浩,砂田茂, "マルチコプター用ダクテッドロータの空力特性",第49回流体力学講演会/第35回航空宇宙数値シミュレーション技術シンポジウム,2017年6月28日~30日,東京.
5) 田中陸久,田辺安忠,砂田茂,米澤宏一,得竹浩, "ロータ間の空力干渉における位相角差の影響に対する考察",第49回流体力学講演会/第35回航空宇宙数値シミュレーション技術シンポジウム,2017年6月28日~30日,東京.
6) Koichi Yonezawa, Hironori Matsumoto, Kazuyasu Sugiyama, Hiroshi Tokutake, Yasutada Tanabe, Shigeru Sunada, "Development of High-Performance Multi-Rotor Drone," Fourteenth International Conference on Flow Dynamics, November 1-3, 2017, Sendai International Center.
7) Yasutada Tanabe, Masahiko Sugiura, Takashi Aoyama, Hideaki Sugawara, Shigeru Sunada, Koichi Yonezawa, Hiroshi Tokutake, "Influences of Upper and Side Walls on the Performance of a Multiple Rotor Drone," 6th Asian-Australian Rotorcraft Forum & Heli Japan 2017n, November 7-9, 2017, Kanazawa, Japan.
8) Koichi Yonezawa, Hironori Matsumoto, Kazuyasu Sugiyama, Hiroshi Tokutake, Yasutada Tanabe, Shigeru Sunada, "Development of a Ducted Rotor for Multicopters," 6th Asian-Australian Rotorcraft Forum & Heli Japan 2017, November 7-9, 2017, Kanazawa, Japan.
9) Raijo Torita, Takuji Kishi, Hiroshi Tokutake, Shigeru Sunada, Yasutada Tanabe, Koichi Yonezawa, "Modeling of Aerodynamic Characteristics of Drone and Improvement of Gust Response," 6th Asian-Australian Rotorcraft Forum & Heli Japan 2017, November 7-9, 2017, Kanazawa, Japan.
10) 田辺安忠,青山剛史,杉浦正彦,菅原暎明, "マルチコプタを用いた農薬散布の数値シミュレーション",第55回飛行機シンポジウム,2017年11月20~22日,島根県松江市島根県民会館.
11) 米村哲,得竹浩,砂田茂,田辺安忠,米澤宏一, "超音波の反射を利用したドローン搭載用風速遠隔計測センサの開発",第55回飛行機シンポジウム,2017年11月20~22日,島根県松江市島根県民会館.
JSS2利用状況
計算情報
- プロセス並列手法: 非該当
- スレッド並列手法: OpenMP
- プロセス並列数: 1
- 1ケースあたりの経過時間: 720.00 時間
利用量
総資源に占める利用割合※1(%): 0.22
内訳
JSS2のシステム構成や主要な仕様は、JSS2のシステム構成をご覧下さい。
| 計算システム名 | コア時間(コア・h) | 資源の利用割合※2(%) |
|---|---|---|
| SORA-MA | 570,860.89 | 0.08 |
| SORA-PP | 232,987.32 | 2.92 |
| SORA-LM | 0.00 | 0.00 |
| SORA-TPP | 0.00 | 0.00 |
| ファイルシステム名 | ストレージ割当量(GiB) | 資源の利用割合※2(%) |
|---|---|---|
| /home | 060.80 | 0.04 |
| /data | 3,662.11 | 0.07 |
| /ltmp | 488.28 | 0.04 |
| アーカイバシステム名 | 利用量(TiB) | 資源の利用割合※2(%) |
|---|---|---|
| J-SPACE | 0.00 | 0.00 |
※1 総資源に占める利用割合:3つの資源(計算, ファイルシステム, アーカイバ)の利用割合の加重平均.
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
JAXAスーパーコンピュータシステム利用成果報告(2017年4月~2018年3月)