Numerical Simulation of a Multiple Rotor UAV Inside Narrow Tunnels
JAXA Supercomputer System Annual Report April 2018-March 2019
Report Number: R18ECMP17
Subject Category: Competitive Funding
- Responsible Representative: Yasutada Tanabe, Senior Researcher, Aviation Systems Research Unit, Aeronautical Technology Directorate
- Contact Information: Yasutada Tanabe, Leader, Aeronautical Technology Directorate, Aviation Systems Research Unit(tan@chofu.jaxa.jp)
- Members: Yasutada Tanabe, Hideaki Sugawara, Riku Tanaka, Kuniyuki Takekawa
Abstract
Represented by the multiple rotor type UAV (Unmanned Aerial Vehicle), or so-called drone, the flying robot has been applied to disaster relief and other operations. However, the wind and gust resistence of this type of drone need to be further improved. Especially in the observation and survey of existing infrastructures, buidings and bridges, the drones are often required to fly near walls. The flowfields around the drones are significantly changed with walls nearby and highly depend on the distance between the drone and the walls. It is considered very effective to incorporate the wall influence on the flight performance into the flying control rules.
This research is carried out as a part of the Tough Robotics Challenge funded by the ImPACT Program of Council for Science, Technology and Innovation (Cabinet Office, Government of Japan). The flight performance of a multiple rotor UAV inside narrow tunnels was investigated through CFD simulations
Reference URL
Please refer to '革新的研究開発推進プログラム ImPACT: 研究開発プログラム: 田所 諭PM'.
Reasons for using JSS2
Numerical simulations of multiple rotors are carried out using a CFD code, rFlow3D, developed at JAXA. The rotor blades are modeled with high fidelity. A large amount of flight conditions must be considered and each takes a long time of CPU hours. JSS2 supercomputer is a prerequisite of this kind of research.
Achievements of the Year
A multiple rotor inside narrow tunnel is numerically simulated. When the distance between the wall and the blade tip of the rotor shorter than 2.0 times of the rotor diameter, the rotor aerodynamic forces changes remarkably. The rotor thrust decreases significantly by the circulation flowfield due to the rotor downwash.
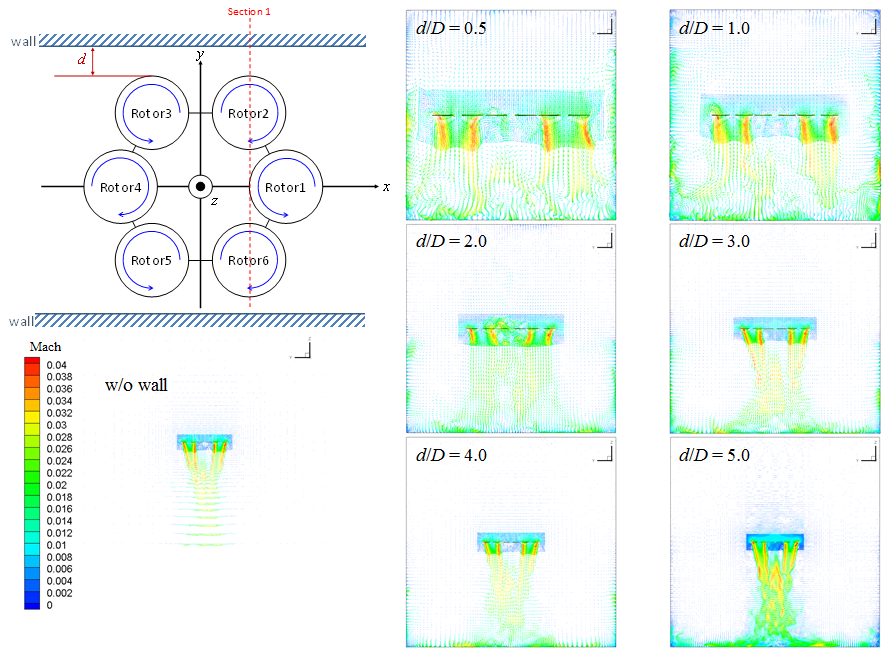
Fig.1: Flowfield of the multiple rotor inside narrow tunnels
Publications
- Peer-reviewed papers
1) Yasutada Tanabe, Masahiko Sugiura, Takashi Aoyama, Hideaki Sugawara, Shigeru Sunada, Koichi Yonezawa, and Hiroshi Tokutake, Multiple Rotors Hovering Near an Upper or a Side Wall, Journal of Robotics and Mechatronics, Vol. 30, No. 3, 2018, pp.344-353.
- Non peer-reviewed papers
1)Yasutada Tanabe (JAXA), Hideaki Sugawara (Ryoyu Systems Co., Ltd), Shigeru Sunada (Nagoya University), Koichi Yonezawa (CRIEPI), Hiroshi Tokutake (Kanazawa University), Flight Performance of a Multicopter Inside a Tunnel, 49th JSASS Annual Symposium, April 19-20, 2018. (in Japanese)
2) Koichi Yonezawa, Hironori Matsumoto, Yasutada Tanabe, Shigeru Sunada, Hiroshi Tokutake, Kazuyasu Sugiyama, Aerodynamic Characteristics of a Multi-Rotor Near a Structure, ANSS2018, Miyazaki, July 4-6, 2018. (in Japanese)
3) Yasutada Tanabe, Hideaki Sugawara, Shigeru Sunada, Koichi Yonezawa and Hiroshi Tokutake, Aerodynamics of Single and Multiple Rotors Hovering Inside a Square Tunnel, 44th European Rotorcraft Forum, Delft University of Technology (TU Delft), The Netherlands, Sept. 18-20, 2018. Paper #0040.
4) Yasutada Tanabe, Hideaki Sugawara, Shigeru Sunada, Koichi Yonezawa and Hiroshi Tokutake, Physics of Interaction Between Multiple Rotors and an Upper Wall, 7th Asian/Australian Rotorcraft Forum, Jeju Island, Korea, Oct 30 - Nov 1, 2018. ARF7-A-04 (180038).
5) Koichi Yonezawa, Hironori Matsumoto, Kazuyasu Sugiyama, Yasutada Tanabe, Hiroshi Tokutake, Shigeru Sunada, An Experimental Investigation of Aerodynamic Characteristics of a Quad-Rotor-Drone Hovering near a Side Wall and a Ceiling, 7th Asian/Australian Rotorcraft Forum, Jeju Island, Korea, Oct 30 - Nov 1, 2018. Poster03(180049).
Usage of JSS2
Computational Information
- Process Parallelization Methods: N/A
- Thread Parallelization Methods: OpenMP
- Number of Processes: 1
- Elapsed Time per Case: 720 Hour(s)
Resources Used
Fraction of Usage in Total Resources*1(%): 0.40
Details
Please refer to System Configuration of JSS2 for the system configuration and major specifications of JSS2.
| System Name | Amount of Core Time(core x hours) | Fraction of Usage*2(%) |
|---|---|---|
| SORA-MA | 749,684.66 | 0.09 |
| SORA-PP | 525,280.31 | 4.20 |
| SORA-LM | 0.00 | 0.00 |
| SORA-TPP | 0.00 | 0.00 |
| File System Name | Storage Assigned(GiB) | Fraction of Usage*2(%) |
|---|---|---|
| /home | 4,502.50 | 4.66 |
| /data | 5,096.67 | 0.09 |
| /ltmp | 2,564.71 | 0.22 |
| Archiver Name | Storage Used(TiB) | Fraction of Usage*2(%) |
|---|---|---|
| J-SPACE | 7.94 | 0.28 |
*1: Fraction of Usage in Total Resources: Weighted average of three resource types (Computing, File System, and Archiver).
*2: Fraction of Usage:Percentage of usage relative to each resource used in one year.
JAXA Supercomputer System Annual Report April 2018-March 2019