Numerical Simulation of Rotorcraft
Aerodynamics and Aeroacoustics Analysis for Multirotor
This work focuses on a blade design for multirotors such as drones and electric vertical take-off and landing (eVTOL) aircraft. The numerical simulations are conducted to investigate the blade designs that achieve both aerodynamic performance and low aerodynamic noise. The effect of blade design parameters on aerodynamic performance and noise are investigated for a multicopter and a lift-and-cruise type aircraft.
The aerodynamic performance and noise of the multirotor are evaluated using the rotorcraft CFD tool, rFlow3D, and the rotorcraft noise analysis tool, rNoise. The multirotor constructed for the coaxial rotor system is assumed. Numerical simulations are performed under hovering and forward flight conditions. Numerical results show higher noise levels than single-rotor systems due to rapid pressure fluctuations when crossing upper and lower rotor blades. Furthermore, the tip vortices of the forward rotor interact with the rear rotor, affecting aerodynamic performance and noise.
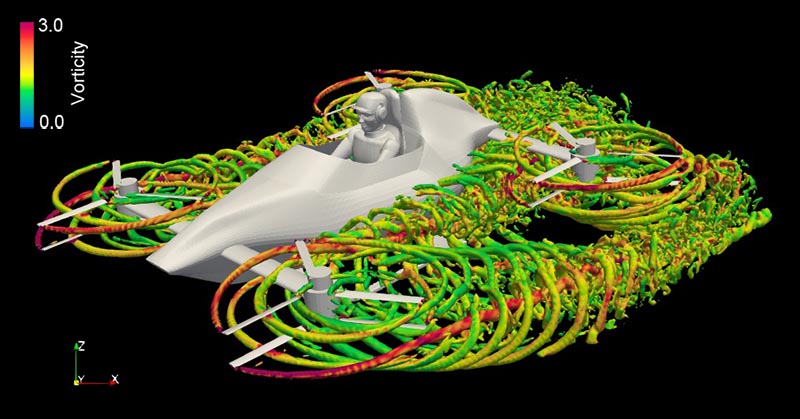
Flowfield around the multirotor.
(iso-surface of Q-criterion of velocity: colored by vorticity)
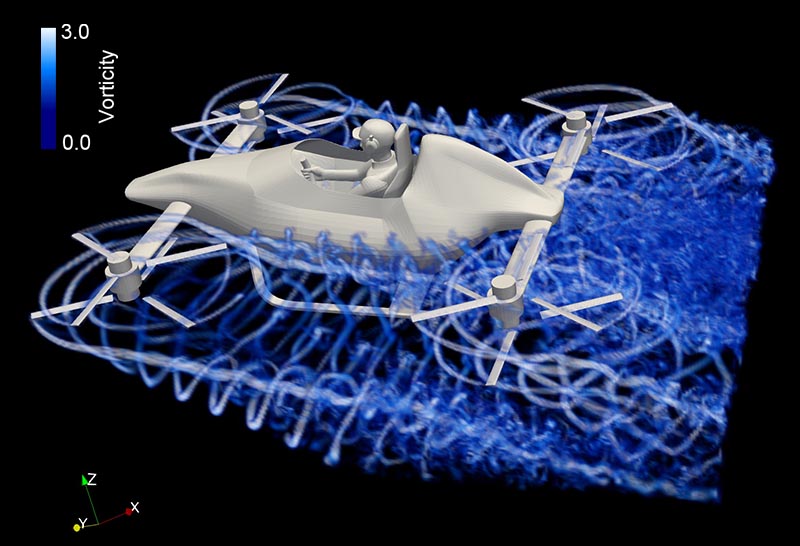
Flowfield around the multirotor.
(volume rendering)
Aerodynamic Investigation of a Multiple-Rotor Drone in Ground Effect
Larger and heavier drones are being developed along with new trials to built multiple-rotor type eVTOLs which can carry several people. However, the flowfields around multiple rotors where the neighboring rotors are rotating in different directions are very complex and not well understood. Espeicially when the multicopters are hovering near the ground, the so-called ground-effect is considered different with the conventional single rotor helicopters.
Computational model based on a prototype variable-pitch controlled quad-rotor drone is created. Flowfields and the drone performance are investigated for the drone hovering at several different height from the ground. It is found that the flowfields for the quad-rotor drone are much complex compared to those of a single rotor.
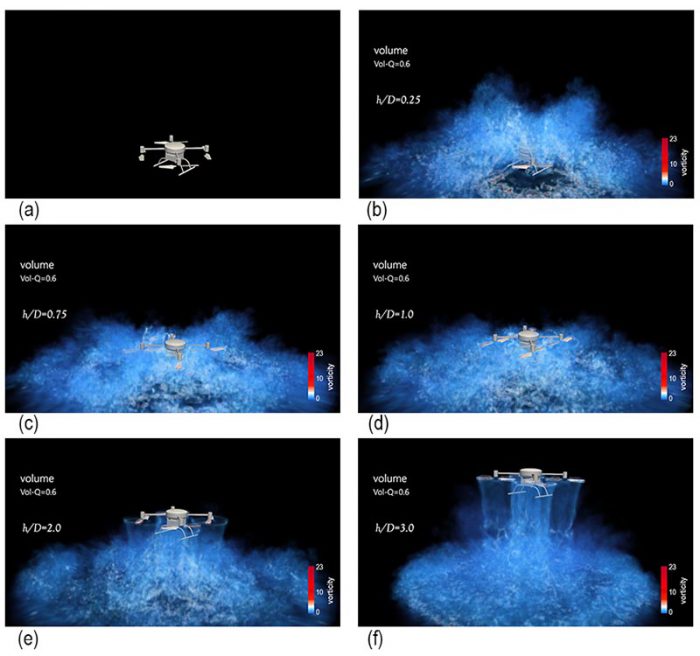
Distribution of vortexes around a multiple-rotor drone (volume rendering)
Movie of Aerodynamic analysis of vortices around a Multiple-Rotor Drone
Future Type Rotary-wing Aircraft System Technology
In Japan, rotary-wing aircrafts can be extremely useful for disaster relief, mountain rescue efforts, and for emergency transportation from isolated islands. To present the conceptual design idea of a compound helicopter suited to these needs, we are striving to accumulate basic design technology of future rotary-wing aircrafts and to perform pioneering technical development ahead of domestic manufacturers. Through these efforts, we will play a pioneering role in the development of future rotary-wing aircrafts, eventually transferring the acquired technology to private sector manufacturers.

The compound helicopter model which can fly.
The unsteady flow fields around multiple rotary wings such as for the compound helicopters are solved using a multi-disciplinary CFD/CSD coupling analysis code, rFlow3D, which is developed at JAXA. Based on a moving overlapping grid method, it can generate the aerodynamic data together with the blade elastic motions. The complex geometries of the rotorcraft fuselages are resolved based on unstructured grid solvers, FaSTAR or TAS-code. Besides of the applications to helicopters, rFlow3D has also been used for other rotary wings, such as propellers, drones with multiple rotors, and wind turbines.
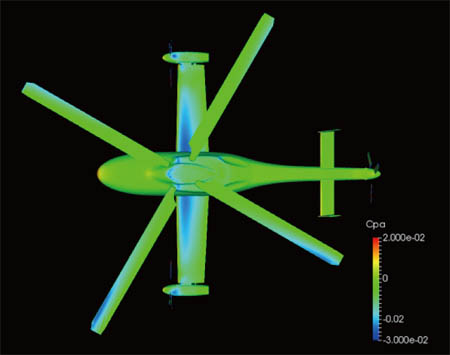
Surface Cpa distribution
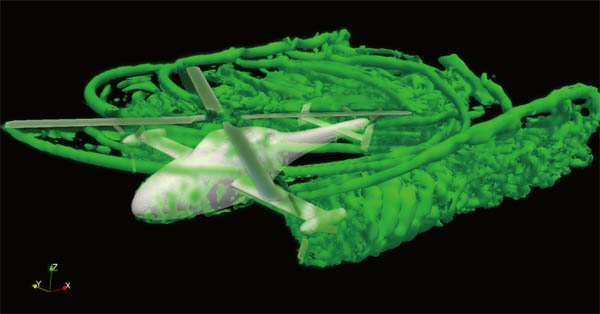
Iso-surface of Cpa around the compound helicopter
Movie of the numerical simulation of the compound helicopter
More information about Helicopter