Wearable UAV (Research for new field development)
JAXA Supercomputer System Annual Report February 2022-January 2023
Report Number: R22EDA201S01
Subject Category: Aeronautical Technology
- Responsible Representative: Toshiya Nakamura, Senior Chief Officer of Fundamental Aeronautics Research
- Contact Information: Daichi Wada(wada.daichi@jaxa.jp)
- Members: Shinsaku Hisada, Atsushi Osedo, Daichi Wada
Abstract
For the mountain rescue and disaster relief, the rescue plan is built based on a limited source of information, which leads the less-effective operation and a risk of secondary disasters. To solve this problem, personal flying system is developed, which carries a rescue team to the target area in advance to the main rescue operation. Gathering information and making decisions on-site contributes to the rescue plan with high reliability and effectiveness.
Reference URL
N/A
Reasons and benefits of using JAXA Supercomputer System
The controller of the flying system is generated by deep reinforcement learning. JAXA supercomputer system is beneficial in that it enables the multi-core calculation for the deep reinforcement learning. In addition, it is effective to submit multiple jobs at a time for the paramter study.
Achievements of the Year
Deep reinforcement learning was applied to a generate controller for 3-degree-of-freedom attitude control..The model was set in a gimbal rig and utilized thrust vectoring. Considering the full working range of attitude (euler angles), the contrller was designed based on quaternion feedback.
The domain randomization was applied to the training. As a result, a neural network was generated that was adaptive to the gap between the simulation and reality. The experimental control was successfully demonstrated (Fig.1).
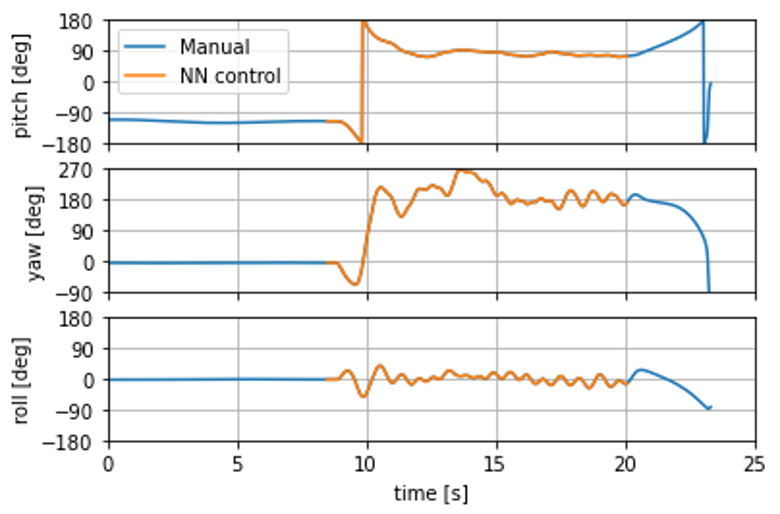
Fig.1: The result of attitude control. After the neural network control was activated, the attitude was stabilized at the target pitch angle 90 degrees (Top), the yaw angle 180 degrees (Middle) and the roll angle 0 degrees (Bottom). The control was successfully demonstrated.
Publications
N/A
Usage of JSS
Computational Information
- Process Parallelization Methods: OpenAI Gym and PyTorch.
- Thread Parallelization Methods: OpenAI Gym and PyTorch.
- Number of Processes: 1 - 36
- Elapsed Time per Case: 72 Hour(s)
JSS3 Resources Used
Fraction of Usage in Total Resources*1(%): 0.20
Details
Please refer to System Configuration of JSS3 for the system configuration and major specifications of JSS3.
| System Name | CPU Resources Used(Core x Hours) | Fraction of Usage*2(%) |
|---|---|---|
| TOKI-SORA | 0.00 | 0.00 |
| TOKI-ST | 66840.20 | 0.07 |
| TOKI-GP | 341428.88 | 14.52 |
| TOKI-XM | 0.00 | 0.00 |
| TOKI-LM | 4.07 | 0.00 |
| TOKI-TST | 0.00 | 0.00 |
| TOKI-TGP | 0.00 | 0.00 |
| TOKI-TLM | 0.00 | 0.00 |
| File System Name | Storage Assigned(GiB) | Fraction of Usage*2(%) |
|---|---|---|
| /home | 15.00 | 0.01 |
| /data and /data2 | 150.00 | 0.00 |
| /ssd | 150.00 | 0.02 |
| Archiver Name | Storage Used(TiB) | Fraction of Usage*2(%) |
|---|---|---|
| J-SPACE | 0.00 | 0.00 |
*1: Fraction of Usage in Total Resources: Weighted average of three resource types (Computing, File System, and Archiver).
*2: Fraction of Usage:Percentage of usage relative to each resource used in one year.
ISV Software Licenses Used
| ISV Software Licenses Used(Hours) | Fraction of Usage*2(%) | |
|---|---|---|
| ISV Software Licenses(Total) | 0.00 | 0.00 |
*2: Fraction of Usage:Percentage of usage relative to each resource used in one year.
JAXA Supercomputer System Annual Report February 2022-January 2023