CFD Simulations of Agriculture Spraying from Multi-Rotor Drones
JAXA Supercomputer System Annual Report April 2016-March 2017
Report Number: R16E0069
- Responsible Representative: Yoshikazu Makino(Next Generation Aeronautical Innovation Hub Center, Aeronautical Technology Directorate)
- Contact Information: Yasutada Tanabe(tan@chofu.jaxa.jp)
- Members: Takashi Aoyama, Yasutada Tanabe, Masahiko Sugiura, Hideaki Sugawara, Kuniyuki Takekawa, Hisato Takeda, Takahiro Yamamoto, Shogo Goto
- Subject Category: Aviation(Flight operation)
Abstract
High fidelity CFD simulations for three types of multi-rotor drones used for agricultural spraying are performed. The sprayed particles are also dynamically simulated considering their gravity and air resistance. The rotating propellers and the major body and support arms are numerically modelled. The sprayed particle distributions on the monitoring heights are calculated and validated with the experimentally measurements. At some certain flight conditions, when the sprayed particles go out of the downwash of the rotors, the particles drafted in the air and can be carried away from the flight path. It is desirable to put the spray nozzle inside the rotor downwash to obtain ideal spraying effect.
Goal
This research is carried out with the fund from Ministry of Agriculture, Forestry and Fisheries of Japan for promoting the usage of robotics technologies in the agricultural fields. Using the CFD code, rFlow3D, developed in JAXA, the pesticide spraying from several multi-rotor drones is simulated. Through accurate understanding of the spraying distributions under various flight speeds and cross winds, the operation guidelines will be updated and the spraying devices will be improved.
Objective
Three types of multi-rotor drones with different number of rotors of 4, 6 and 8 are selected. The flight speeds are 15 and 20 km/hr and cross winds of 0, 1, 3, 5 m/s are simulated. The spraying distributions are compared and validated with experimental data. Furthermore, the locations of the spraying nozzles are changed and the differences in the spraying patterns are evaluated. Appropriate locations of the spraying nozzles are recommended.
References and Links
N/A
Use of the Supercomputer
The supercomputer is necessary to carry out these large-scale, multiple test case simulations.
Necessity of the Supercomputer
The utilization of the supercomputer in JAXA was a pre-emptive to carry out this simulation project to provide solutions for the social requirements.
Achievements of the Year
The numerical models used in the simulations of the three types of multicopters are shown in Fig.1. Only the main components are considered. The details and the skids are omitted in the models to achieve reasonable simulation efficiency. Representative spray patterns from these three multicopters are shown in Fig.2. Red points indicate the sprayed particles.

Fig.1:Three multicopter models with different number of rotors
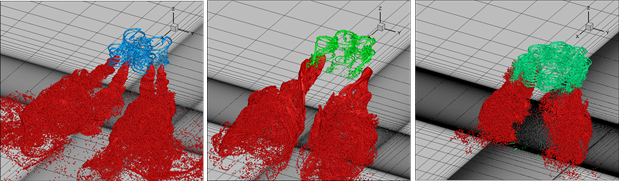
Fig.2:Sprayed particle patterns from three types of multicopters at flight speed of 15km/hr in calm air
Publications
N/A
Computational Information
- Parallelization Methods: Thread Parallelization
- Process Parallelization Methods: n/a
- Thread Parallelization Methods: OpenMP
- Number of Processes: 1
- Number of Threads per Process: 32,12
- Number of Nodes Used: 1
- Elapsed Time per Case (Hours): 1440
- Number of Cases: 50
Resources Used
Total Amount of Virtual Cost(Yen): 2,948,637
Breakdown List by Resources
| System Name | Amount of Core Time(core x hours) | Virtual Cost(Yen) |
|---|---|---|
| SORA-MA | 1,095,493.08 | 1,801,812 |
| SORA-PP | 109,125.44 | 931,712 |
| SORA-LM | 0.00 | 0 |
| SORA-TPP | 0.00 | 0 |
| File System Name | Storage assigned(GiB) | Virtual Cost(Yen) |
|---|---|---|
| /home | 5,367.36 | 19,267 |
| /data | 45,071.30 | 161,796 |
| /ltmp | 6,624.35 | 23,780 |
| Archiving System Name | Storage used(TiB) | Virtual Cost(Yen) |
|---|---|---|
| J-SPACE | 8.74 | 10,268 |
Note: Virtual Cost=amount of cost, using the unit price list of JAXA Facility Utilization program(2016)
JAXA Supercomputer System Annual Report April 2016-March 2017