ImPACTドローン受託研究
JAXAスーパーコンピュータシステム利用成果報告(2021年2月~2022年1月)
報告書番号: R21JCMP17
利用分野: 競争的資金
- 責任者: 牧野好和, 航空技術部門航空プログラムディレクタ付
- 問い合せ先: 田辺 安忠(tan@chofu.jaxa.jp)
- メンバ: 浜本 佑典, 木村 桂大, 菅原 瑛明, 竹川 国之, 田辺 安忠
事業概要
マルチロータ型ドローンやeVTOLの空力性能, 飛行特性, 騒音などについて, 外部の大学や研究機関と連携して, 数値解析及び実験を通じて研究を行う. 主に政府助成の外部資金を利用している.
参照URL
https://www.jss.jaxa.jp/en/rotorcraft/ 参照.
JAXAスーパーコンピュータを使用する理由と利点
複数のロータを有するマルチロータの数値シミュレーションは多くの計算点数を必要として, 流れ場も非定常のため, 長時間の計算が必要である. スパコンの利用が必須である.
今年度の成果
クワッドロータドローンの中央部にある胴体をなくした場合の流れ場の様子を通常胴体ありのクワッドロータドローンと比較して, 地面に沿う流れの速度分布の変化を調べた. 胴体によって, クワッドロータ中央部のアップウォッシュが抑制され, その流れが周辺へ偏向されることによって, 地面に沿う流れの速度が大きくなることが判明した. 図1に胴体ありの場合の流れ場の様子, 図2に胴体無しの場合の流れ場の様子, 図3にロータの対角上の回転中心を通る断面における速度のプロファイルの比較, 図4にロータの間の隙間の中央断面上の速度のプロファイルの比較を示す.

図1: クワッドロータドローン(胴体あり)の地面効果内でのホバリング飛行時の流れ場の様子

図2: クワッドロータ(胴体無し)の地面効果内でのホバリング飛行時の流れ場の様子
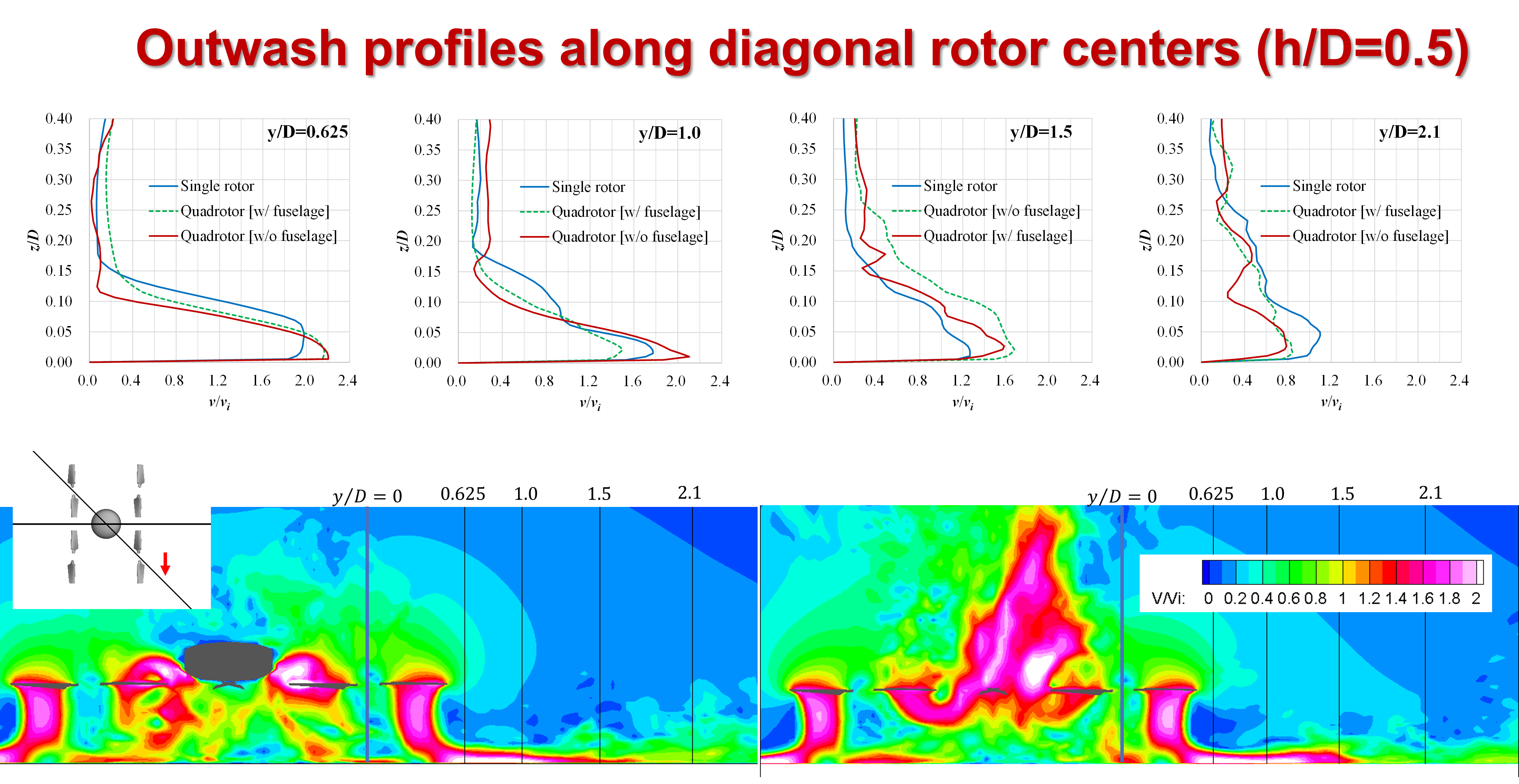
図3: クワッドロータの回転中心断面における地面に沿う流れの速度分布の比較

図4: クワッドロータのロータ間隙間断面における地面に沿う流れの速度分布の比較
成果の公表
-査読付き論文
1) Tanabe, Y., et al. (2021), Quadrotor Drone Hovering in Ground Effect, J. Robotics and Mechatronics, 33-2, 339-347.
-査読なし論文
1) Yasutada Tanabe, Hideaki Sugawara, Shigeru Sunada, Koichi Yonezawa, Hiroshi Tokutake, NUMERICAL INVESTIGATION OF QUAD ROTORS IN GROUND EFFECT, 47th European Rotorcraft Forum (Virtual Conference), September 7-10, 2021.
2) Koichi Yonezawa, Kazuki Akiba, Hao Liu, Hideaki Sugawara, Yasutada Tanabe, Hiroshi Tokutake and Shigeru Sunada, Numerical Investigations of Ground Effect of a Quadcopter, 2021 Asia-Pacific International Symposium on Aerospace Technology (APISAT2021), November 15-16, 2021, Jeju, Korea & Online.
-その他
1) 田辺安忠(2021), マルチロータにおける空力課題と解析技術, 月刊車載テクノロジー, 8-8, 46-57.
JSS利用状況
計算情報
- プロセス並列手法: 非該当
- スレッド並列手法: OpenMP
- プロセス並列数: 1
- 1ケースあたりの経過時間: 1500 時間
JSS3利用量
総資源に占める利用割合※1(%): 0.75
内訳
JSS3のシステム構成や主要な仕様は、JSS3のシステム構成をご覧下さい。
| 計算システム名 | CPU利用量(コア・時) | 資源の利用割合※2(%) |
|---|---|---|
| TOKI-SORA | 2725485.29 | 0.13 |
| TOKI-ST | 4359645.60 | 5.37 |
| TOKI-GP | 0.00 | 0.00 |
| TOKI-XM | 0.00 | 0.00 |
| TOKI-LM | 326.92 | 0.02 |
| TOKI-TST | 190482.23 | 4.00 |
| TOKI-TGP | 0.00 | 0.00 |
| TOKI-TLM | 0.00 | 0.00 |
| ファイルシステム名 | ストレージ割当量(GiB) | 資源の利用割合※2(%) |
|---|---|---|
| /home | 1470.31 | 1.46 |
| /data及び/data2 | 25087.23 | 0.27 |
| /ssd | 1556.44 | 0.40 |
| アーカイバシステム名 | 利用量(TiB) | 資源の利用割合※2(%) | J-SPACE | 9.18 | 0.06 |
|---|
※1 総資源に占める利用割合:3つの資源(計算, ファイルシステム, アーカイバ)の利用割合の加重平均.
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
ISV利用量
| 利用量(時) | 資源の利用割合※2(%) | |
|---|---|---|
| ISVソフトウェア(合計) | 87.68 | 0.06 |
※2 資源の利用割合:対象資源一年間の総利用量に対する利用割合.
JAXAスーパーコンピュータシステム利用成果報告(2021年2月~2022年1月)